Research
My research work has spanned a wide range of application areas, consistently focusing on prototyping immersive experiences to elicit various types of responses from participants. My initial research in 2012 explored interactive playgrounds. Currently, my focus is on utilizing immersive technology to design and evaluate robotic and autonomous behaviors.
Simulation
The Ph.D. Thesis provides a comprehensive summary of my work on simulators over recent years, featuring three key simulators that I highlight below. The thesis presentation offers a video overview of these methods.
Ph.D. Thesis Presentation
Apologies for the zoom-level quality of the recording.Should you be so inclined, you are welcome to review the thesis.
XR-ROOM and VR-OOM
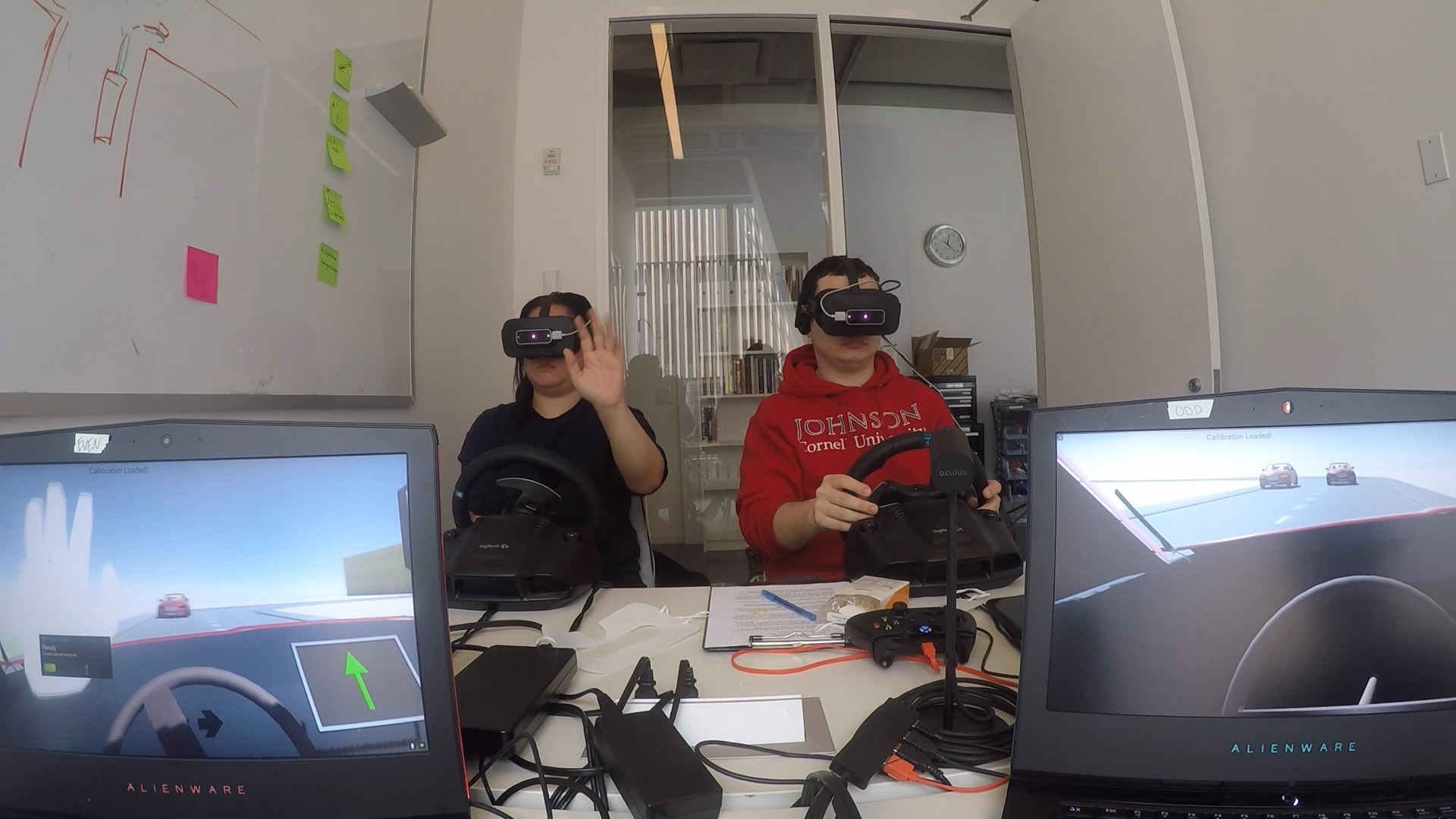
 The XR-OOM and VR-OOM systems offers high-fidelity, mixed/virtual-reality driving simulations using a real moving vehicle as part of the simulator. The focus of these publications was to established the technical feasability of these systems, and validate their use with some inital testing.
The XR-OOM and VR-OOM systems offers high-fidelity, mixed/virtual-reality driving simulations using a real moving vehicle as part of the simulator. The focus of these publications was to established the technical feasability of these systems, and validate their use with some inital testing.
The two main publications are VR-OOM (CHI-2018) and XR-OOM (CHI-2022).
XR-OOM Summary Video
StrangeLand
 StrangeLand is a portable, multi-participant VR system to profile human driving behavior across geographical locations, aiming to enable autonomous vehicles to adapt to local norms. The focus was on establishing the system’s functionality and validity through cross-cultural deployments. StrangeLand is currently extend to include more participants direct ROS clients to enable Human Robot Interaction experiemnts. GitHub organization.
StrangeLand is a portable, multi-participant VR system to profile human driving behavior across geographical locations, aiming to enable autonomous vehicles to adapt to local norms. The focus was on establishing the system’s functionality and validity through cross-cultural deployments. StrangeLand is currently extend to include more participants direct ROS clients to enable Human Robot Interaction experiemnts. GitHub organization.
Acoustically Aware Robots
Explored the frontier of acoustically aware robotics through workshops at Stanford’s CCRMA and the HRI conference, alongside collaboration with Guy Hoffman at Cornell Tech in 2022. I demonstrated proof-of-concept implementation at the Linux Audio Conference. This work aims to explore how sound, as a contextual indicator, can be used to guide the action planning of a social robot. (e.g., Do not attempt to vacuum when lots of people are around.) And demonstrate acoustic awareness (e.g., don’t make much noise moving around in a quiet space.)
Other
As part of an effort to engage with other research directions and groups, I have participated in further research on and off campus. Here are a select few that do not fall into the previous categories.
Using Speech
Democratizing Design and Fabrication Using Speech: Exploring co-design with a voice assistant. This project explores the use of Wizard-of-Oz-backed voice assistants in automating custom design tasks. The study evaluates participant interactions with a voice assistant capable of designing holiday ornaments, with a focus on the qualitative and quantitative aspects of the user experience.
Human-Drone Interaction
A Drone Teacher: Designing Physical Human-Drone Interactions for Movement Instruction. This project delves into enhancing drone-to-human communication through physical touch. The study designs and evaluates various modes of physical interaction, finding continuous physical feedback to be the most effective and preferred method for instructive tasks.
Electronics

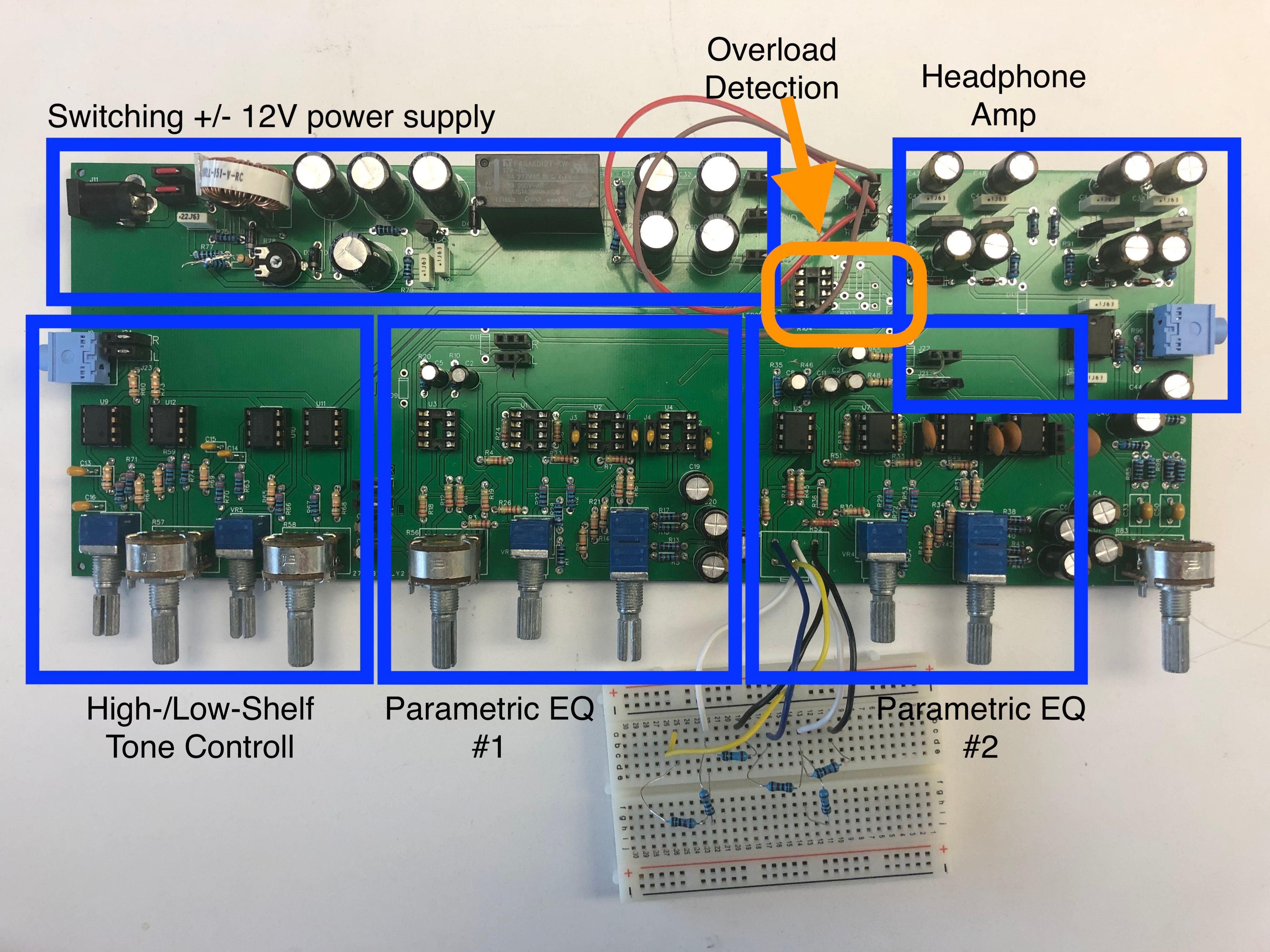
In this side project, I developed a parametric stereo equalizer, by merging various established designs. This project reflects my basic proficiency in electronic and PCB design, underscoring my commitment to continuous learning in this field.
References: Power Supply, Tone Control, State Variable Filters, Headphone Amp, Urei 545 Design. The Annotated PCB
{kind=link}
{kind=link}